University of Illinois at Urbana-Champaign


Audio demo
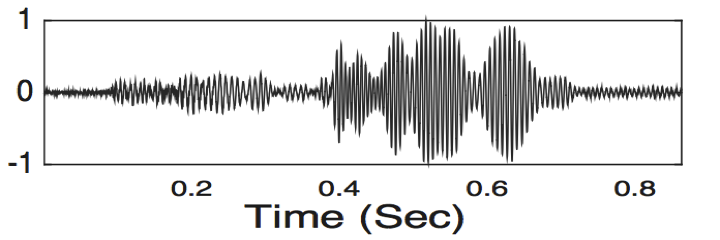
Note: Waveforms are maximally amplified. Perceived volumes vary due to frequency contents (ref: perceived loudness v/s frequency).
Demo 1: (Reference in paper: section 4)
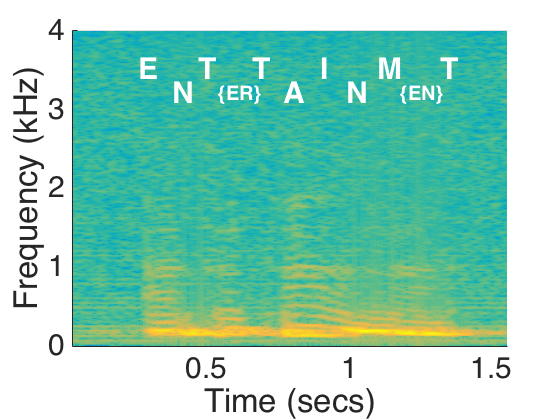
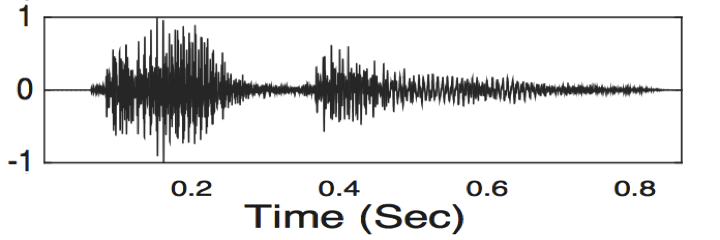
Vibra-motor signal: Before processing
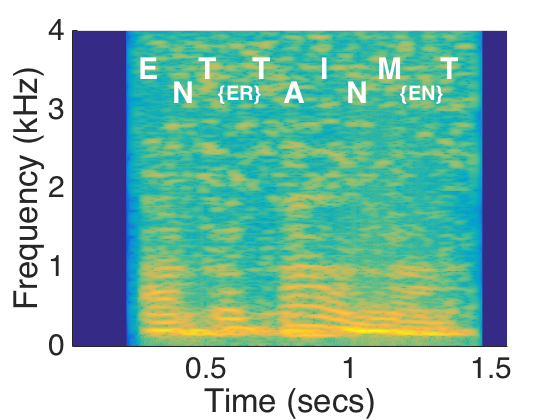
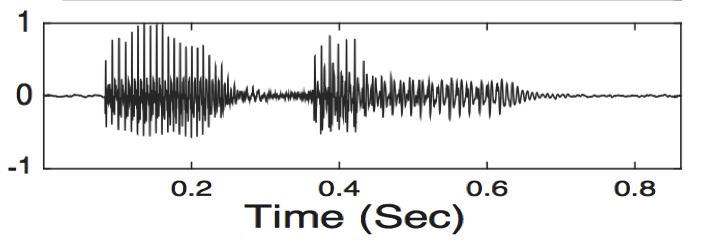
Vibra-motor signal: After processing
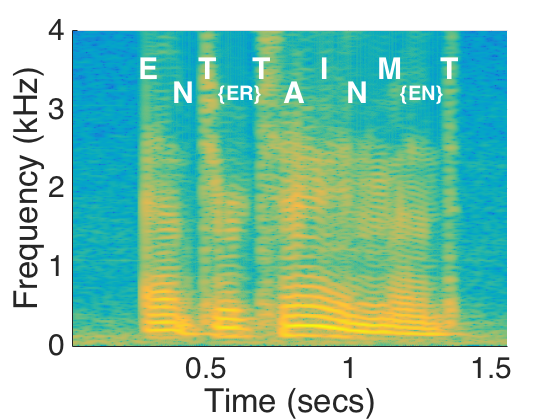
Microphone signal
Info: Two out of six volunteers identified the word from the raw vibration signal itself, while Automatic Speech Recognition application worked with the processed vibration signal and microphone signal only.
Demo 2:
A few other words with different phonemes.
| Words | V-motor: Raw | V-motor: Processed | Microphone |
|---|---|---|---|
| Author | |||
| Black | |||
| Look |
Can you guess the words of this table?
| Words | V-motor: Raw | V-motor: Processed | Microphone |
|---|---|---|---|
| ? | |||
| ? |
Demo 3: (Reference in paper: section 5.2)
Vibra-motor signal: Before processing
Vibra-motor signal: After processing
Microphone signal
Info: For this word signal-processing improved the sound of the fricative consonant [f] and the nasal consonant [n].
Key research elements
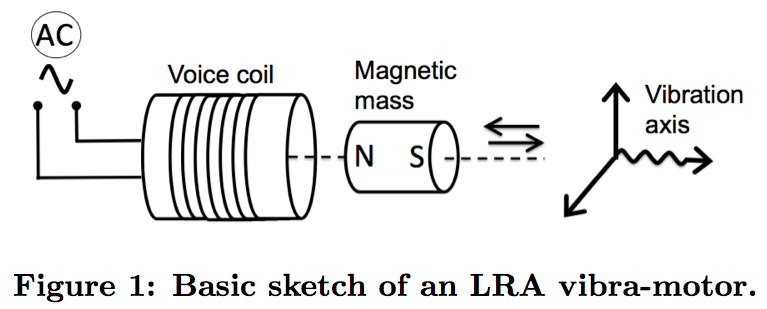
- Sound sensing through back-EMF: Back-EMF is an electro-magnetic effect observed in magnet-based motors when relative motion occurs between the current carrying armature/coil and the magnetic mass’s own field. Since sound is a source of external vibration, the movable mass in the vibra-motor is expected to exhibit a (subtle) response to it. Our experiments show that, when the vibra-motor is connected to an ADC, the back-EMF generated by the ambient sound can be recorded.
- Sensor specific distortion removal: The vibra-motor’s response, on the other hand, is considerably jagged, and thereby induces distortions into the recorded signal. For example, the vibra-motor distortions on the spoken phoneme “u” alters the original formants at 266 and 600Hz to new formants at 300Hz and 1.06KHz, which changes perception of the sound. We apply the frequency domain equalizetion to restore the formant locations.
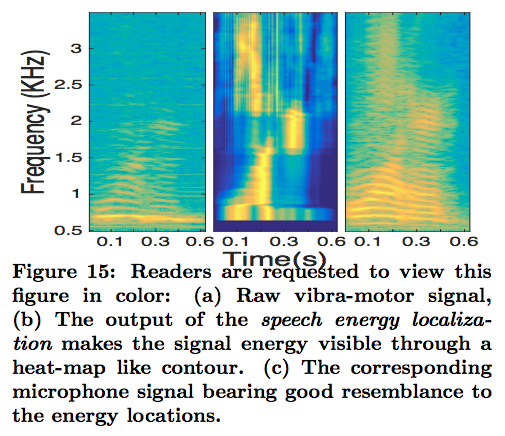
- Reconstruction of the missing speech features: Deafness in vibra-motors implies that the motor’s response to high frequency signals (i.e., > 2KHz) is indistinguishable from noise. The erasure of this high frequency features reduces the intelligibility of a recorded voice. We recover the original speech by partially recorstructing speech features from the recorded signal, using the speech energy localization and voice source expansion techniques.
Experiment platforms
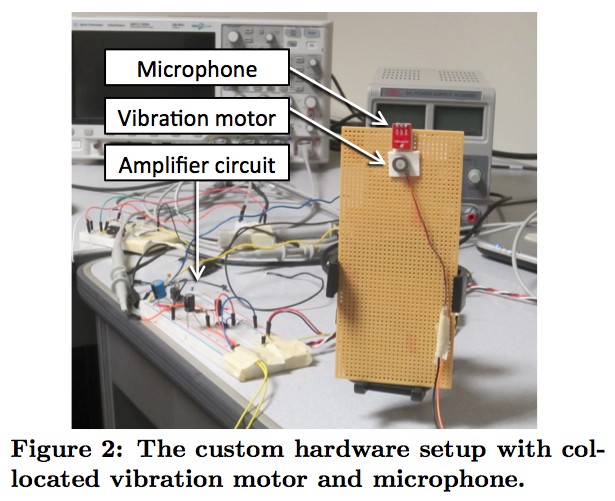
Custom hardware setup
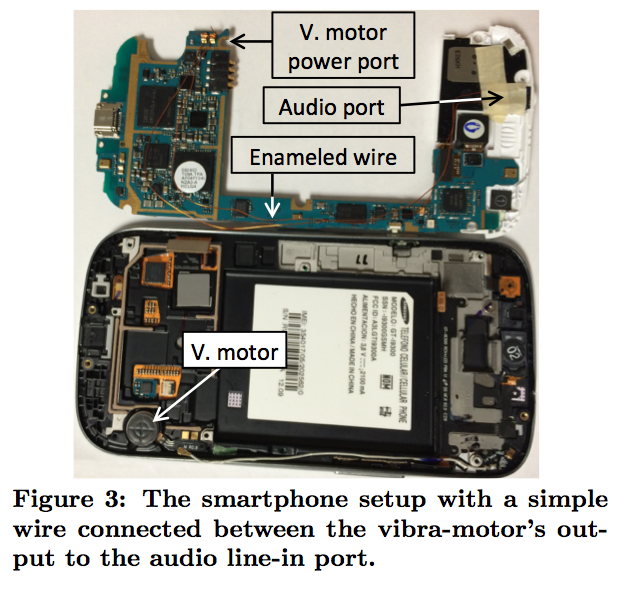
Smartphone setup
Papers
Related work
USENIX Security Symposium 2014
Yan Michalevsky, Dan Boneh, Gabi Nakibly [paper] [2] AccelWord: Energy Efficient Hotword Detection through Accelerometer
MobiSys 2015
Li Zhang, Parth H. Pathak, Muchen Wu, Yixin Zhao, Prasant Mohapatra [paper] [3] Acoustic eavesdropping through wireless vibrometry
MobiCom 2015
Teng Wei, Shu Wang, Anfu Zhou, Xinyu Zhang [paper] [4] The Visual Microphone: Passive Recovery of Sound from Video
SIGGRAPH 2014
Abe Davis, Michael Rubinstein, Neal Wadhwa, Gautham Mysore, Fredo Durand, William T. Freeman [paper] [5] Ripple: Communicating through Physical Vibration
NSDI 2015
Nirupam Roy, Mahanth Gowda, Romit Roy Choudhury [paper] [6] Ripple II: Faster Communication through Physical Vibration
NSDI 2016
Nirupam Roy, Romit Roy Choudhury [paper]
People
Funding
Faculty

|
Romit Roy Choudhury |
Students

|
Nirupam Roy |