| There is growing agreement that
wireless capacity (at the PHY and MAC layers) is reaching saturation.
Many believe that the
next ?jump? in network capacity will emerge from new ways
of organizing networks. While there exists substantial work on new
network architectures, one assumption that most proposals
seem to make is that infrastructure ? WiFi APs, enterprise WLANs,
cell towers ? is static. This project considers the possibility of
relaxing this assumption and explores the implications of physically
moving wireless network infrastructure to improve/optimize desired
performance metrics. For example, we envision WiFi access points on
wheels that move within a small region to exploit the multipath nature
of wireless signals; in the future, we envision drones flying into high
demand areas, hovering at strategic locations, and serving as cellular
proxies to ground clients. This project is a foray into the landscape
of such "robotic wireless networks". |
|||
 |
|||
People:
|
|||
Experimentation Platform (Mobile WiFi Access Point): 
Figure above shows an iMob AP
assembled using a Roomba iRobot
2.1, a webcam, and a laptop equipped with Intel 5300 802.11n
cards. The laptop is mounted on the iRobot and connected to it
over the serial interface; it is also connected to a Microsoft live
cam (attached in front of the iRobot) to guide its motion. The
laptop acts as the controller for the whole system, sending motion
commands to the robot (via the OSI interface), while also
controlling the network interface for transmission/reception. 8
laptop clients were uniformly scattered at various locations and
programmed to communicate back to the iMob AP.
The robot?s mobility is confined within a 2x2 feet square region,
demarcated by colored duct tapes pasted on the floor. If the
robot drifts out of the square box, the camera detects the color
of the duct tapes and triggers a change in heading direction.
The AP
performs ?raster scans? within the square box at a
speed of 10 cm/sec ? during the scan, the AP continuously sends
around 200 packets/second, equivalent to 60 packets per 3cms.
Transmissions are performed on regular OFDM with 3x3 MIMO
at both 2.4GHz and 5GHz bands. Clients record the per-packet
channel state information (CSI) for offline analysis. Experimentation Platform (Cellular Extension through Drones): 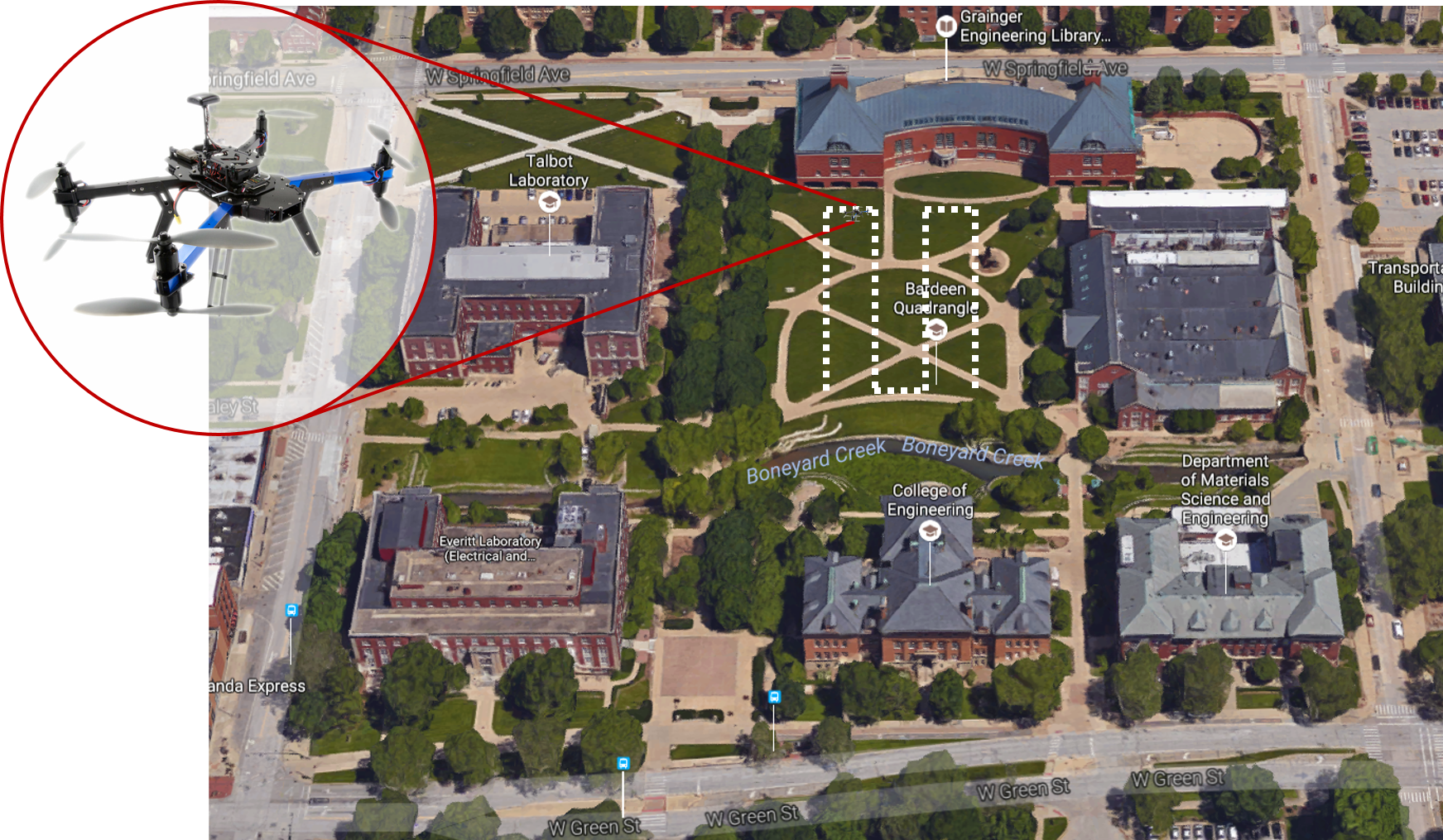 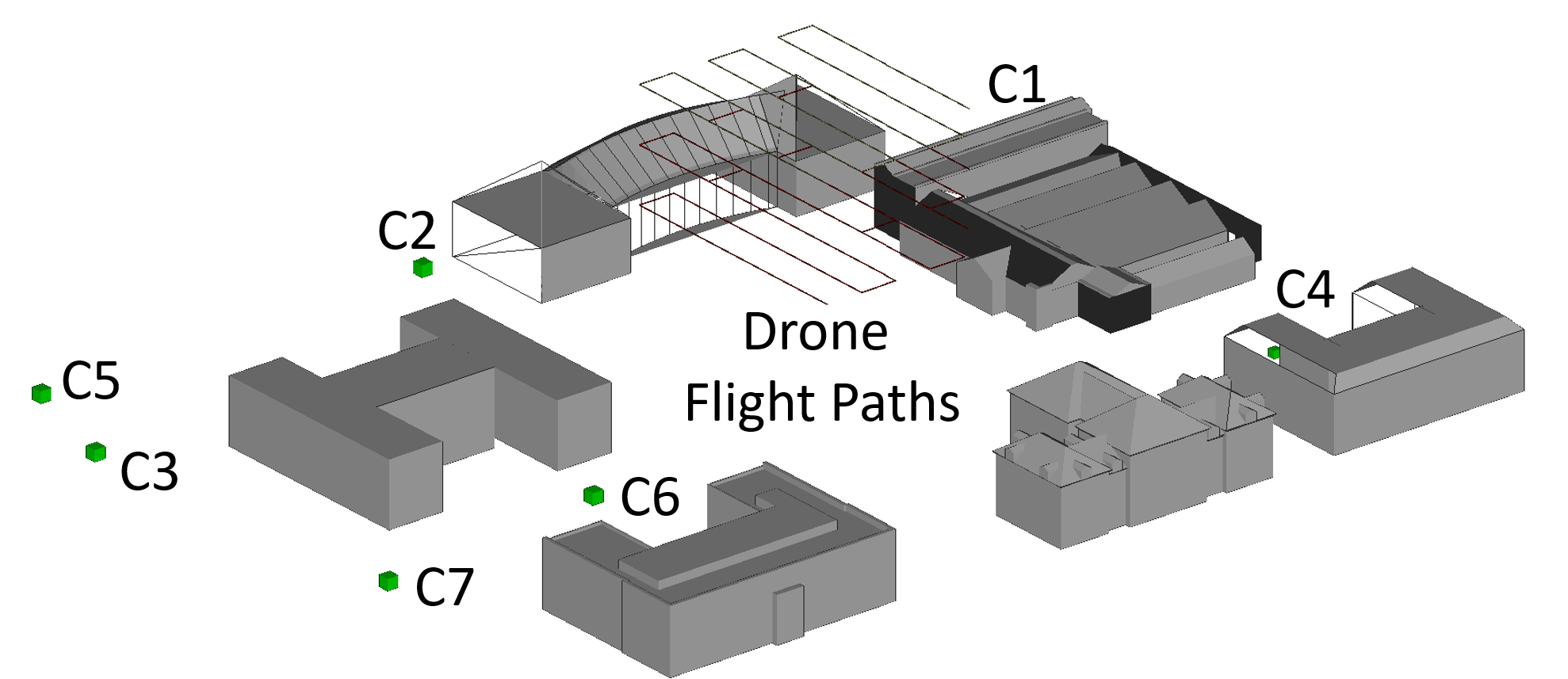
The above figures shows a drone carrying a
WiFi router providing coverage to potential clients spread across an outdoor area.
Reducing the search space for placement of the drone is achieved through use of
ray-tracing techniques over a 3D model of the large structures and terrain.
The ray-tracing estimates are used as a guide and the drone performs real measurements in the vicinity of this guided location. This achieves close to Oracle gains for most clients. |
|||
Main Results (Mobile WiFi Access Point): 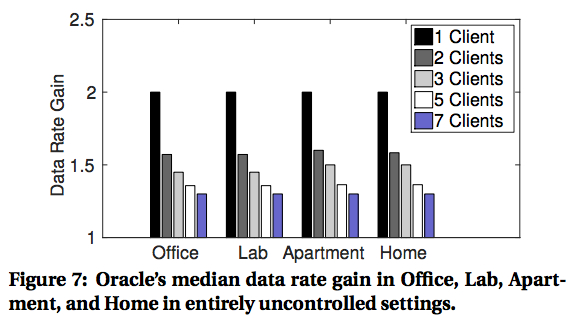 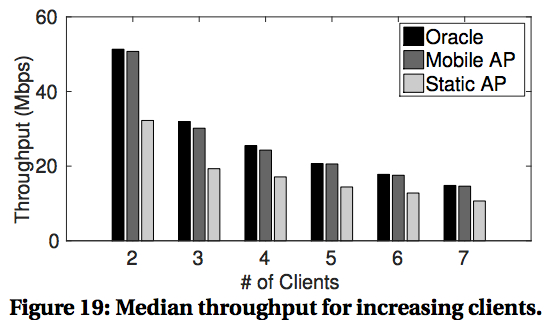 Main Results (Cellular Extension through Drones): 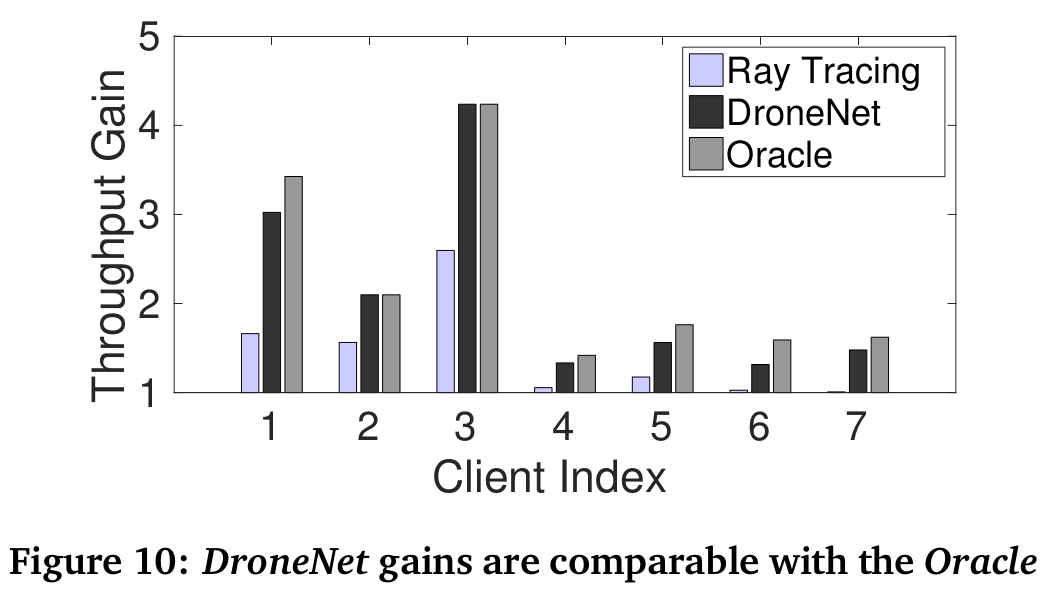 |
|||
|
Publications:
|
|||
|
Future Directions:
|
|||
UIUC/USC Collaboration:
|
|||
|
Educational and Outreach Activities:
|
|||
Funding:   |